Python捆绑调整程序

项目描述
Python捆绑调整
- 加载数据。
from pyba.CameraNetwork import CameraNetwork
import pickle
import glob
import numpy as np
image_path = './data/test/camera_{cam_id}_img_00000{img_id}.jpg'
pr_path = './data/test/df3d_2/pose_result*.pkl'
d = pickle.load(open(glob.glob(pr_path)[0], 'rb'))
camNet = CameraNetwork(points2d=d['points2d'], calib=d, image_path=image_path)
points2d是一个形状为T x J x 2的numpy数组。所有单位均为像素。calib是一个嵌套字典,其键是相机ID,从0开始索引,到n_cameras-1结束。值是另一组字典,其键为"R","tvec","intr","distort"。
calib = {0: {'R': array([[ 0.90885957, 0.006461 , -0.41705219],
[ 0.01010426, 0.99924554, 0.03750006],
[ 0.41697983, -0.0382963 , 0.90810859]]),
'tvec': array([1.65191596e+00, 2.22582670e-02, 1.18353733e+02]),
'intr': array([[1.60410e+04, 0.00000e+00, 2.40000e+02],
[0.00000e+00, 1.59717e+04, 4.80000e+02],
[0.00000e+00, 0.00000e+00, 1.00000e+00]]),
'distort': array([0., 0., 0., 0., 0.])},
1: {'R': array([[ 0.59137248, 0.02689833, -0.80594979],
[-0.00894927, 0.9996009 , 0.02679478],
[ 0.80634887, -0.00863303, 0.59137718]]),
'tvec': array([ 1.02706542e+00, -9.25820468e-02, 1.18251732e+02]),
'intr': array([[1.60410e+04, 0.00000e+00, 2.40000e+02],
[0.00000e+00, 1.59717e+04, 4.80000e+02],
[0.00000e+00, 0.00000e+00, 1.00000e+00]]),
'distort': array([0., 0., 0., 0., 0.])},
}
- 可视化2D姿态。
import matplotlib.pyplot as plt
img = camNet.plot_2d(0, points='points2d')
plt.figure(figsize=(20,20))
plt.imshow(img, cmap='gray')
plt.axis('off')

- 进行捆绑调整。
from pyba.pyba import bundle_adjust
bundle_adjust(camNet)
Iteration Total nfev Cost Cost reduction Step norm Optimality
0 1 7.1659e+05 7.27e+05
1 2 2.9376e+05 4.23e+05 1.08e+01 3.12e+05
2 4 2.6084e+05 3.29e+04 2.39e+00 1.85e+05
3 5 2.4676e+05 1.41e+04 3.04e+00 2.20e+04
4 7 2.4604e+05 7.20e+02 1.32e+00 1.75e+04
5 8 2.4579e+05 2.53e+02 2.67e+00 2.86e+04
6 9 2.4487e+05 9.20e+02 2.53e+00 2.18e+04
7 10 2.4472e+05 1.43e+02 2.48e+00 2.02e+04
8 11 2.4441e+05 3.18e+02 6.71e-01 1.77e+03
9 12 2.4440e+05 9.43e+00 6.78e-01 2.13e+03
`ftol` termination condition is satisfied.
Function evaluations 12, initial cost 7.1659e+05, final cost 2.4440e+05, first-order optimality 2.13e+03.
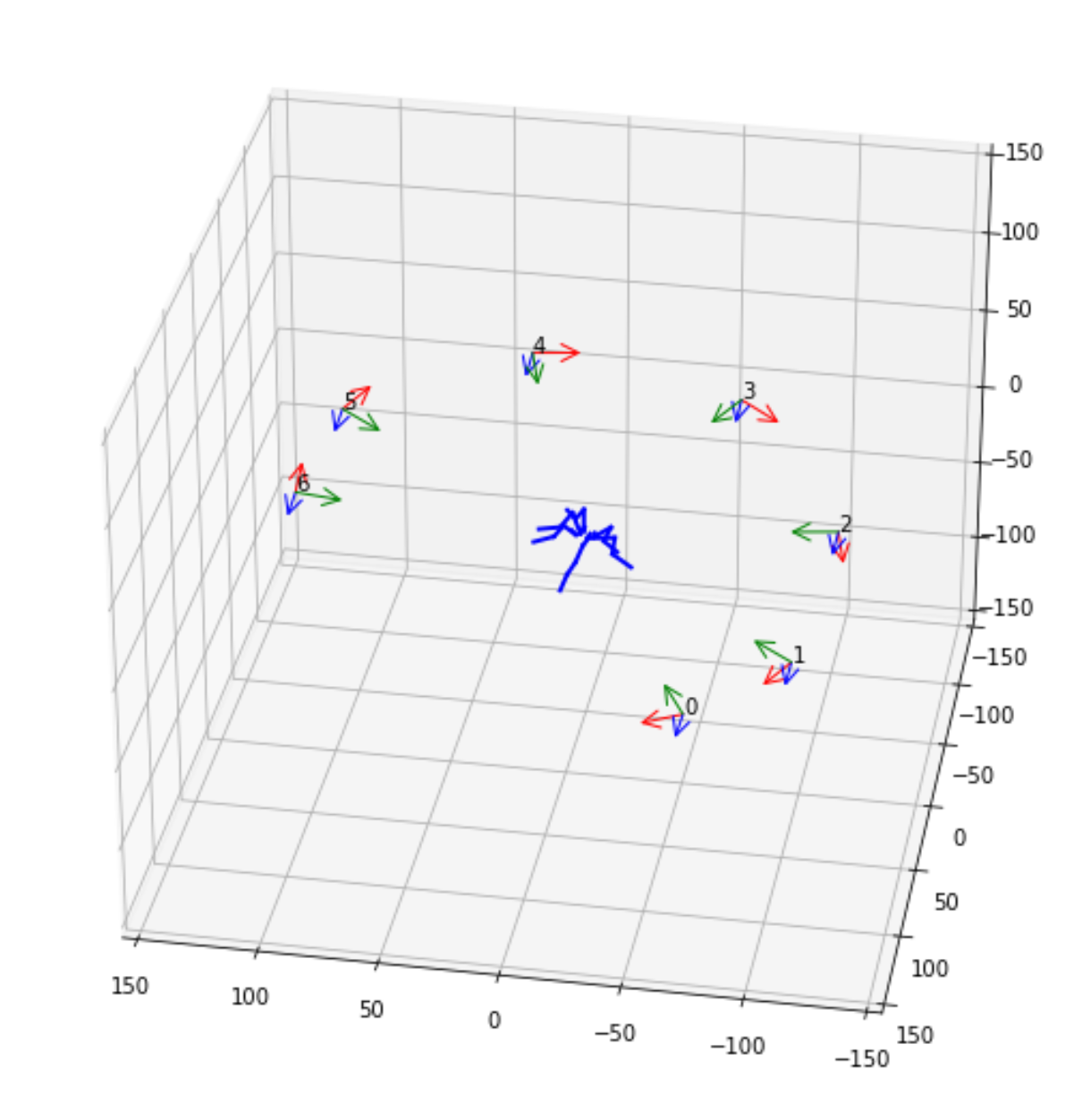
- 可视化结果相机装置。
fig = plt.figure(figsize=(10,10))
ax3d = fig.add_subplot(111, projection='3d')
camNet.draw(ax3d, size=20)
camNet.plot_3d(ax3d, img_id=0, size=10)


下载文件
为您的平台下载文件。如果您不确定选择哪个,请了解更多关于安装包的信息。
源代码发行版
pyba-0.13.tar.gz (9.0 kB 查看哈希值)
构建发行版
pyba-0.13-py3-none-any.whl (10.1 kB 查看哈希值)
关闭
pyba-0.13.tar.gz的哈希值
| 算法 | 哈希摘要 | |
|---|---|---|
| SHA256 | 584723371e2916eba014db9886964f652c84b6b2ce82084556752c1fead5c853 |
|
| MD5 | d8684216e9ee205923b68569a174d374 |
|
| BLAKE2b-256 | c295b9ed91dab572bed7269b5d6703dcddea1bcbf77d2e46fa57559fbb9f9b70 |