Jupyter widgets for the ROS ecosystem.



项目描述
ROS对jupyter笔记本的支持
虽然Jupyter生态系统已被数据科学和机器学习社区广泛采用,但机器人社区尚未加入这一行列!围绕ROS(机器人操作系统)的大多数工具都是使用Python和QT构建的。
然而,使用QT将用户与代码分离。我们为jupyter notebook构建了一套ROS工具,旨在为利用jupyter notebook的强大功能进行机器人开发的开发者提供丰富的、交互式的体验。
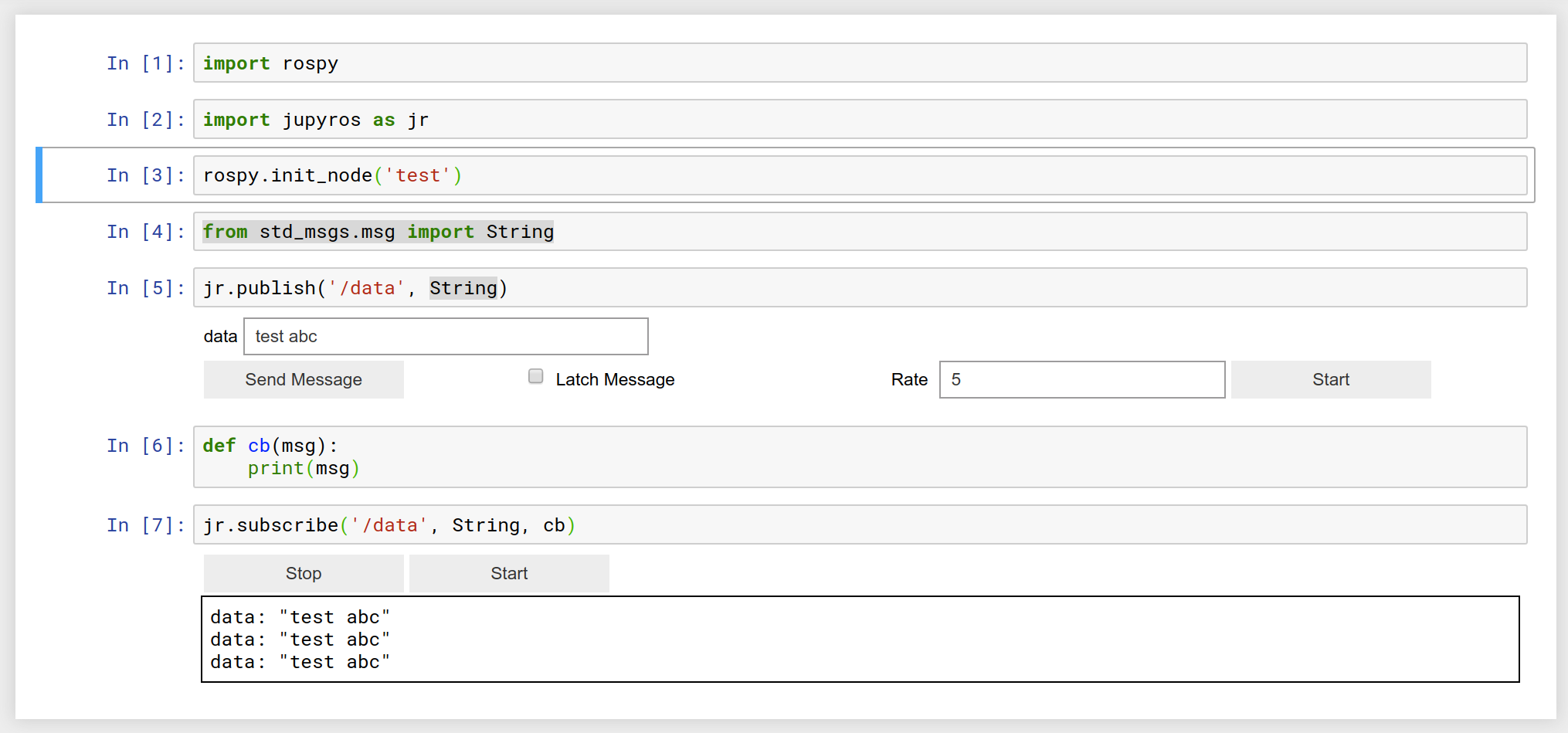
使用jupyter-ros,可以轻松创建用于发送消息的自定义消息类型的小部件。
如果您觉得这个软件包很有用,请不要犹豫,贡献您的力量!您也可以随时联系 w.vollprecht@gmail.com 或者通过推特: https://twitter.com/wuoulf,或者在 Gitter 加入我们。
安装和依赖项
您需要一个带有 rospy 的 ROS 环境。我们推荐使用 Robostack(按照他们的安装说明操作),它允许您在 conda 环境中安装 ROS。此外,还需要 numpy 和 bqplot 用于实时绘图,ipywidgets 用于交互式小部件,以及 ipycanvas 用于 Turtlesim 动画。
conda install jupyter bqplot pyyaml ipywidgets ipycanvas
pyyaml 是 rospy 所必需的。
使用 conda 或 mamba 安装
conda install jupyter-ros -c robostack
开发安装
您可以使用以下命令创建一个开发环境:
conda create -n jupyros -c conda-forge python nodejs=14 jupyterlab=3 jupyter bqplot pyyaml ipywidgets ipycanvas
对于开发安装(需要 npm),
git clone https://github.com/RoboStack/jupyter-ros.git
cd jupyter-ros
pip install -e .
jupyter nbextension install --py --symlink --sys-prefix jupyros
jupyter nbextension enable --py --sys-prefix jupyros
要更新 defaults.js JavaScript,您需要运行 python jupyros/ros3d.py。
故障排除
您可能会看到类似于“rospy 包未在您的 $PYTHONPATH 中找到。订阅和发布将无法工作。您需要激活您的 ROS 环境?”的警告。
在安装过程中这无害,但如果您在笔记本中看到这个警告,您应该检查您的 ROS 环境是否已激活。您也可以使用以下命令在笔记本内部设置路径:
import sys
sys.path.append('/opt/ros/melodic/lib/python2.7/dist-packages/')
# The next line should now work!
import jupyros
如果您在运行一个单元格时遇到了以下错误“无法显示类型为 VBox 的 Jupyter Widget”,您可以通过运行以下命令来解决它:jupyter nbextension enable --py --sys-prefix widgetsnbextension
许可协议
我们使用一个共享版权模式,允许所有贡献者保留其对贡献的版权。
本软件根据 BSD-3-Clause 许可证授权。有关详细信息,请参阅 LICENSE 文件。


下载文件
下载适合您平台的文件。如果您不确定选择哪个,请了解有关 安装包 的更多信息。
源代码发行版
构建发行版
jupyros-0.7.0.tar.gz 的哈希值
| 算法 | 哈希摘要 | |
|---|---|---|
| SHA256 | e21cb6cd7535076cb2bf93f9b1aef002a313a11922e0f39dab954512663a2877 |
|
| MD5 | c71bf1bda29c061ea32ee04b808ed332 |
|
| BLAKE2b-256 | 9b3b3d6935e89efee10b49bd5638a156473ca4b27d9e74c7bddf4efcfb0235f0 |